Multi Robot WAAM and NDE cell
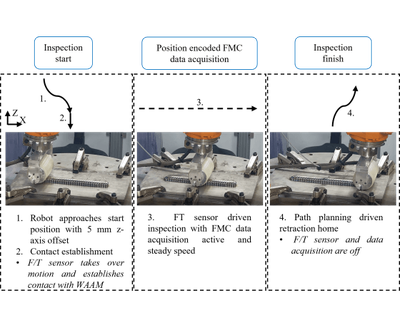
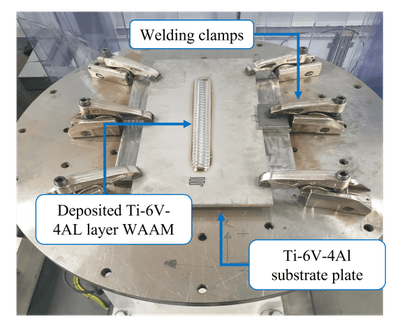
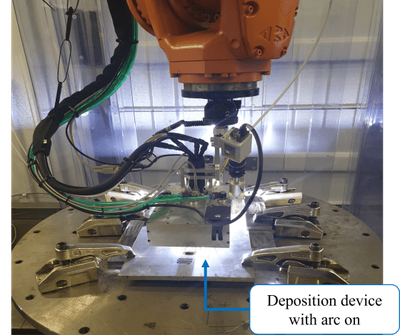
The demand for cost-efficient manufacturing of complex metal components has driven research for metal Additive Manufacturing (AM) such as Wire + Arc Additive Manufacturing (WAAM). WAAM enables automated, time- and material-efficient manufacturing of metal parts. To strengthen these benefits, the demand for robotically deployed in-process Non-Destructive Evaluation (NDE) has risen, aiming to replace current manually deployed inspection techniques after completion of the part. This work presents a synchronized multi-robot WAAM and NDE cell aiming to achieve (1) defect detection in-process, (2) enable possible in-process repair and (3) prevent costly scrappage or rework of completed defective builds. The deployment of the NDE during a deposition process is achieved through real-time position control of robots based on sensor input. A novel high-temperature capable, dry-coupled phased array ultrasound transducer (PAUT) roller-probe device is used for the NDE inspection. The dry-coupled sensor is tailored for coupling with an as-built high-temperature WAAM surface at an applied force and speed. The demonstration of the novel ultrasound in-process defect detection approach, presented in this paper, was performed on a titanium WAAM straight sample containing an intentionally embedded tungsten tube reflectors with an internal diameter of 1.0 mm. The ultrasound data were acquired after a pre-specified layer, in-process, employing the Full Matrix Capture (FMC) technique for subsequent post-processing using the adaptive Total Focusing Method (TFM) imaging algorithm assisted by a surface reconstruction algorithm based on the Synthetic Aperture Focusing Technique (SAFT). The presented results show a sufficient signal-to-noise ratio. Therefore, a potential for early defect detection is achieved, directly strengthening the benefits of the AM process by enabling a possible in-process repair.
R. Zimermann et al., “Collaborative Robotic Wire + Arc Additive Manufacture and Sensor-Enabled In-Process Ultrasonic Non-Destructive Evaluation,” Sensors, vol. 22, no. 11, p. 4203, May 2022, doi: 10.3390/s22114203.
Information
- Research Area:Non-Destructive Testing
-
Investigators:
Ehsan Mohseni
, Gareth Pierce, Yashar Javadi, Charles Macleod, Randika Vithanage, Momchil Vasilev, Stewart Williams - Publications:https://doi.org/10.3390/s22114203