Non-Destructive Evaluation of WAAM Components - Automated Deployment
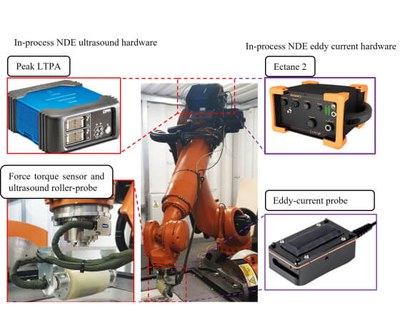
To establish a fully automated WAAM inspection system, the ultrasound roller probe should be manipulated by robots on the arbitrary shaped and undulated WAAM surfaces. To this end, an industrial robotic arm equipped with a force/torque sensor should be programmed to maintain the UT beams normal to the WAAM surface profile, and the contact force between the roller probe and the WAAM to promote the consistency of the acoustic coupling and the UT signal. This is achievable by taking a sensor-driven trajectory planning approach that allows the robot to dynamically correct orientation, position and contact force of the roller probe in real-time. On a different note, the UT inspection data acquired during the automated scan should be accompanied and indexed by the robot position data to aid the operator to locate the defects at the analysis stage.
Information
- Research Area:Non-Destructive Testing
- Publication date:06 July 2020
Activities
List of all current activities related to the work package